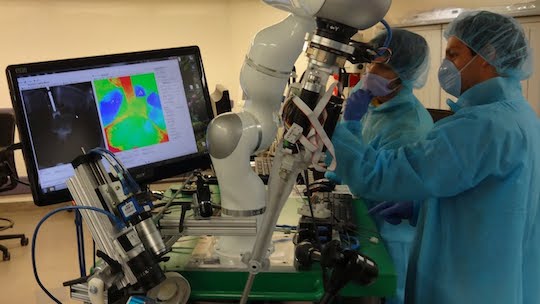
The world’s aging population will face a potential deficit of more than 40K needed surgeons by the end of year 2020. In cardiothoracic surgery, the workload-per-surgeon is expected to more than double by 2035. AI surgical robotics may help address this issue by providing a set of "helping-hands" to assist doctors during surgery. For this, the robot must co-perform task planning – to determine the high-level surgical procedure – and motion planning – to execute the task plan as a series of precise mechanical movements that effect the surgery.
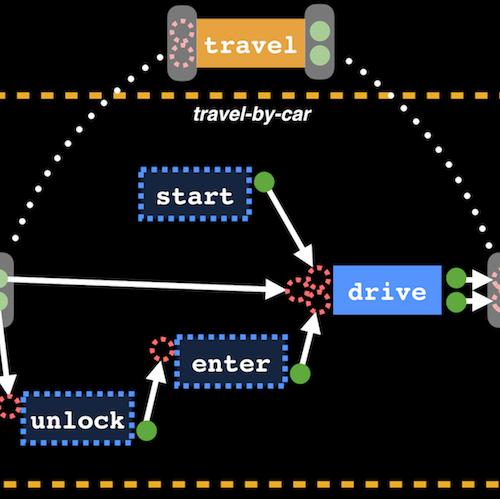
In this project, we will develop a proof-of-concept surgical task planner, which models procedures as a sequence of human-readable and formal actions that transform the robot's initial state to some surgeon-intended goal state; e.g. a robot’s gripper must be co-located with a desired anatomy to 'grasp' the anatomy. Our challenge is to develop a surgical robot whose formal model aligns with the surgeon’s mental model of the procedure. We will work closely with surgeons to refine our models such that surgical robots act in a way that is interpretable to their human partners.
We will: (1) develop new knowledge in surgical robotics and human-robot interaction, (2) disseminate findings at leading conferences and within university outreach events, (3) afford a Computing student to collaboratively work with surgeons to transform lives, (4) ensure Utah's long-term vitality by developing initial results to secure further extramural funding from the NSF and NIH.
This project is in collaboration with Dr. Alan Kuntz and Dr. John R. Stringham, MD.
Project Details
Name: Human-Surgical Robotics
Project Stage: Seedling
Launched: 2019
Categories: Artificial Intelligence,Medicine
Tags: Surgical Robotics,Surgeon-Robot Collaboration,Shared Autonomy,Task Planning,Classical Planning,Human-Robot Interaction
Sponsor:
1U4U
External Site: